9月2日0时33分,经过约6小时的出舱活动,神舟十四号航天员陈冬、刘洋、蔡旭哲密切协同,完成出舱活动期间全部既定任务,陈冬、刘洋已安全返回问天实验舱,出舱活动取得圆满成功。
此次是航天员首次从问天实验舱气闸舱出舱、由小机械臂辅助实施的出舱活动。由我实验室刘宏院士、谢宗武教授团队和中科院长光所联合研制的小机械臂顺利完成第一次单臂支持航天员出舱作业任务。

此次任务中,小机械臂顺利将航天员准确、稳定转运至作业点,再次展现了其运动灵活、定位精准的优点。小机械臂的优异表现为后续系列舱外作业奠定坚实基础,助力航天员快速实现出舱口与作业点间的转移,极大提高出舱作业效率,降低出舱作业风险。
作为空间站“明星”部件之一,什么是小机械臂呢?相比于大机械臂,它有什么优势?
更短小灵活
大小机械臂特点不同,它们可以独立展开工作,也可以通过双臂组合的方式,连接在一起使用。
相比于核心舱配备的大机械臂,小机械臂更加精巧,采用了7自由度对称构型,两端各有一个末端作用器,配合问天实验舱表面的“脚印”,可实现舱体不同位置的爬行。问天实验舱的小机械臂长约5米,最大负载3吨;相比于核心舱配备的展开长度达10米、最大承载质量25吨的大机械臂,要显得更“短小精悍”。
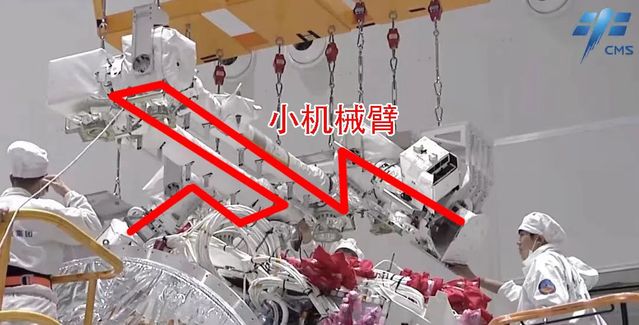
科研人员正在安装小机械臂上舱

问天实验舱舱外安装的小机械臂
精度更高
相较于在天和核心舱上搭载的大机械臂,问天实验舱小机械臂末端定位精度更高,位置精度优于大机械臂5倍,姿态精度优于大机械臂2倍,其运动精度也更高,可用于完成精度要求更高的科学载荷安装、拆卸等任务。
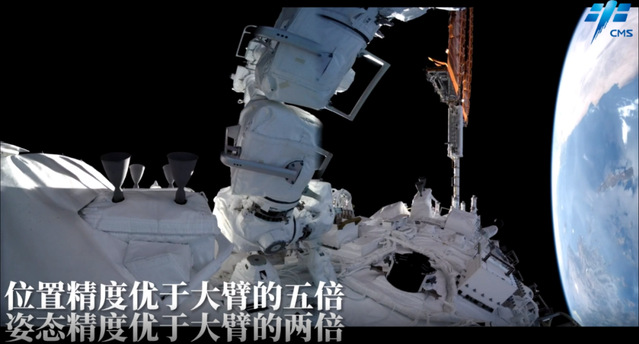
对比大臂的精度优势

空间站实验舱小机械臂发射状态
使用更自由,后续将担大任
小机械臂可单独使用,也可与大机械臂形成组合机械臂,执行大范围、跨舱段的支持航天员出舱活动、舱外状态检查、舱外货物转移及安装、舱外维护维修、载荷照料、光学设施维护等任务。
后续,小机械臂还将与大机械臂完成首次太空“握手”,两臂对接后长度可达15米,扩展机械臂触达范围与距离,为将来完成高难度、多样化任务奠定基础。