2022年初,由哈尔滨工业大学机器人技术与系统国家重点实验室、北京航天飞行控制中心、中国科学院航空航天信息研究所遥感科学国家重点实验室、中国空间技术研究院、加拿大瑞尔森大学等多家单位合作在学术期刊《科学·机器人》(Science Robotics)上发表题为“玉兔二号”月球车2周年的月球背面移动与科学探索(A 2-year locomotive exploration and scientific investigation of the lunar farside by the Yutu-2 rover)的封面论文。
“玉兔”二号月球车运行轨迹(《科学·机器人》杂志封面)
团队成员根据月球车车轮与月面作用的信息和地面力学模型估计了月壤的力学特性,结果表明,月壤风化层的承压特性与地球上的干沙和沙壤土类似,与美国阿波罗计划中的典型月壤相比具有更强的承压特性。在多个不同地点的图像中,观察到“玉兔二号”车轮粘附有大块团状土壤,而“玉兔号”车轮基本不存在粘土现象,这表明,嫦娥四号着陆区附近月壤内聚力较大,其原因可能是包含较高比例的凝集物,使土壤颗粒经车轮碾压更易团聚。
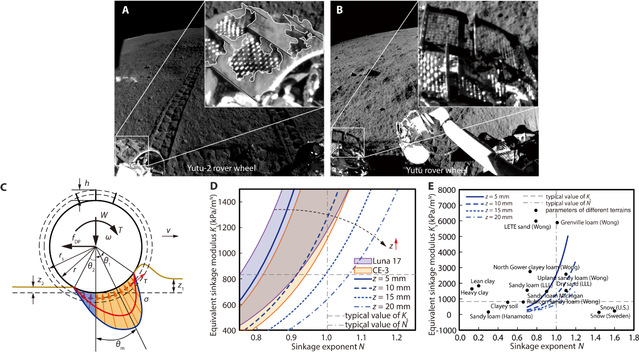
基于“玉兔”二号轮地相互作用的月壤物理力学特性分析
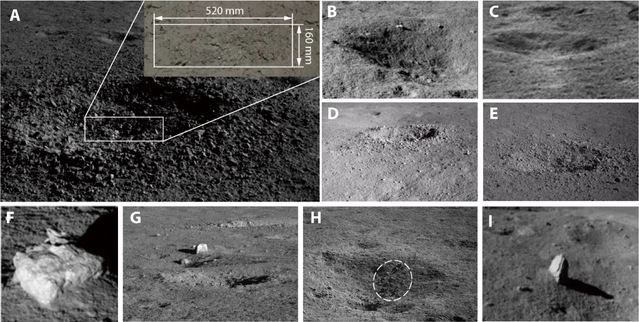
“玉兔二号”观测发现的撞击坑及岩石
该研究立足我国探月任务,面向工程科学问题,相关结果可为未来的月球探测任务提供理论与技术支持。该项研究获得了国家自然科学基金(51822502,91948202,41771488),国家重点研发计划(2019YFB1309500)等资助。
目前嫦娥四号正处于第41月夜,月球车移动里程1142.39米,两器一星状态良好。
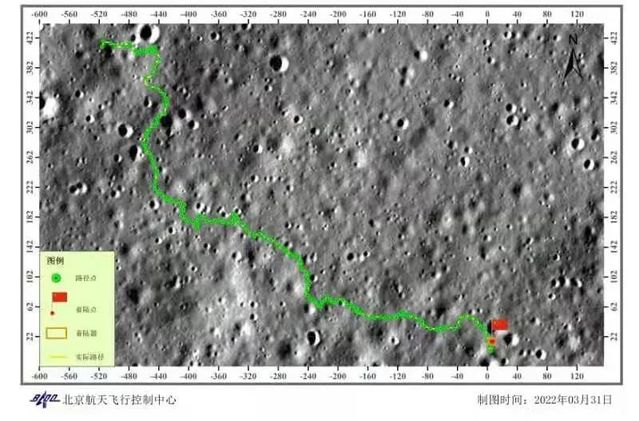
嫦娥四号巡视器前41月昼行驶路线图