导读
机器人技术与系统国家重点实验室刘英想教授团队在国际权威期刊《IEEE工业电子会刊》(IEEE Transactions on Industrial Electronics)发表了题为《基于导电聚合物卷绕纤维差分测量原理的柔性多维角度传感方法》(Differential Sensing Method for Multidimensional Soft Angle Measurement Using Coiled Conductive Polymer Fiber)的学术论文。该成果建立了螺旋导电聚合物的变形传感模型,并提供了一种高精度低漂移的柔性机器人空间姿态检测方法。博士生周栋为论文第一作者,刘英想教授为论文唯一通讯作者,该项工作与美国科罗拉多州立大学联合开展,我校为论文唯一通讯单位;该项工作得到了国家自然科学基金“共融机器人基础理论与关键技术研究”重大研究计划项目的资助(项目批准号:91748108)。
文章信息:Dong Zhou, Yingxiang Liu*, Xintian Tang, Jianguo Zhao, Differential sensing method for multidimensional soft angle measurement using coiled conductive polymer fiber, IEEE Transactions on Industrial Electronics, 2020, DOI: 10.1109/TIE.2019.2962493 (IF: 7.503)https://ieeexplore.ieee.org/document/8948368
研究背景
相较于传统的刚性机器人,柔性机器人由于其自身的高度各向顺应性,在环境适应性和操作安全性等方面均优于传统的刚性机器人。并且由于柔性机构与自然界的生物体相类似,柔性机器人更易实现如抓取、爬行、跳跃以及游泳等仿生运动。然而,柔性机器人的高度顺应性也带来了传感方面的极大挑战。目前成熟的固态传感器虽然可以对柔性机器人的姿态进行检测,但固态传感器的嵌入不可避免的会造成柔性机器人柔性的下降,进而影响机器人整体的性能。因此,研究适合用于柔性机器人姿态检测的新型传感方法,进而建立柔性机器人完整的闭环控制系统,是当前柔性机器人研究领域的核心挑战之一。
创新研究
在该项工作中,研究人员的贡献主要包括以下三个方面:首先,提出了一种简单、低成本的柔性传感器(导电聚合物卷绕纤维,CCPF)的制作工艺,建立了其电阻随长度变化的物理模型,该模型提供了传感器加工参数与传感特性的精确对应关系,对具有螺旋结构的柔性传感器具有普适性;其次,提出了基于对称布置的CCPF的差分传感测量方法,该方法可有效的消除因柔性传感器不稳定带来的漂移和非线性问题,可使CCPF的迟滞从0.13减小到0.03,并大大降低了其非线性问题;最后,设计了基于CCPF差分传感测量方法的闭环控制系统,该系统在一维角度传感的均方根误差小于其测量幅值的3.6%,在多维角度传感的均方根误差小于其测量幅值的4.5%。该项工作为柔性机器人提供了一种可靠的多维角度传感方法,可以广泛应用于不同类型的柔性机器人系统中。
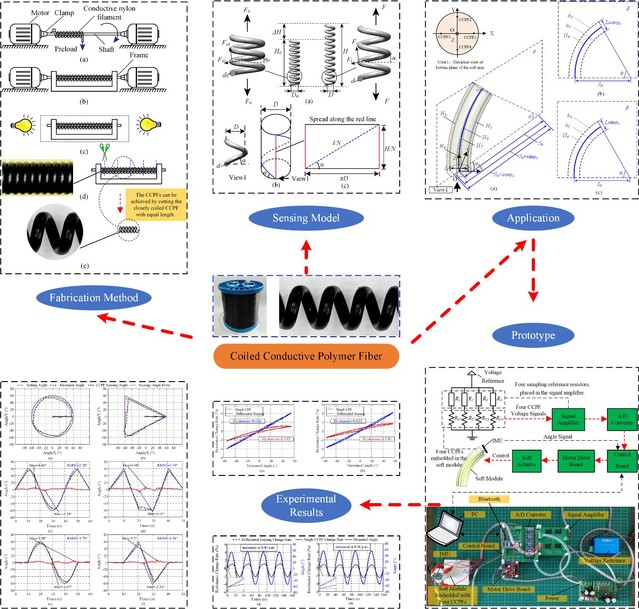
导电聚合物卷绕纤维的制作方法、传感分析、应用展示及其实验测试结果