机器人技术与系统国家重点实验室刘英想教授团队在国际权威期刊《IEEE工业电子会刊》(IEEE Transactions on Industrial Electronics)发表了题为《一种基于贴片式压电驱动器的小型二维机器人球形关节》(Development of a Small Two-Dimensional Robotic Spherical Joint Using a Bonded-Type Piezoelectric Actuator)的学术论文,该成果为兼顾小型化、大运动范围、高精度和多维运动的机器人关节提供了一种有效的解决方案。硕士生高祥和博士生张仕静为论文共同第一作者,刘英想教授为论文唯一通讯作者,我校为论文唯一完成单位与通讯单位;该项工作得到了国家自然科学基金优秀青年科学基金(项目编号:51622502)和国家自然科学基金创新研究群体科学基金项目(项目编号:51521003)的资助。
文章信息:Xiang Gao#, Shijing Zhang#, Jie Deng and Yingxiang Liu*, Development of a small two-dimensional robotic spherical joint using a bonded-type piezoelectric actuator, IEEE Transactions on Industrial Electronics, 2019, DOI: 10.1109/TIE.2019.2959475 (IF: 7.503) https://ieeexplore.ieee.org/document/8936544
多自由度精密操控是机器人领域的一项共性支撑技术,在细胞操控、显微注射、微纳制造、超精加工和精密仪器等领域中均获得了越来越重要的应用。关节作为微纳操控机器人的重要组成部分,对于实现高精密的操控动作至关重要。压电致动具有结构简单、易于小型化、出力密度高、定位精度高、响应快等突出优势,非常适合应用于上述领域,已成为微纳操控技术领域的一项核心技术。目前,如何实现机器人关节小型化、高精度、大运动范围和多维运动的兼顾已成为当前的重要挑战之一。
在该项工作中,研究人员设计了一种贴片式压电驱动器,通过锯齿波信号激励压电驱动器产生两个正交方向的弯曲运动,进而基于惯性驱动原理驱动球形转子实现二维旋转运动。基于压电悬臂梁模型建立了压电驱动器的静力学模型,用于实现驱动器的结构设计与优化;提出了一种特殊的球形转子支承方案和一种独特的螺旋式的预紧调节装置,满足了机器人球形关节的整体封装设计要求;研制了机器人球形关节的样机并搭建了实验系统,机器人关节的总体尺寸为Φ22mm×50.9mm,两个方向的运动范围均为360°;实验测试结果表明:该机器人球形关节兼顾了小型化、大运动范围、高分辨力及二维输出能力,在精密指向调姿、微装配和细胞操控等领域均具有较强的应用潜力。
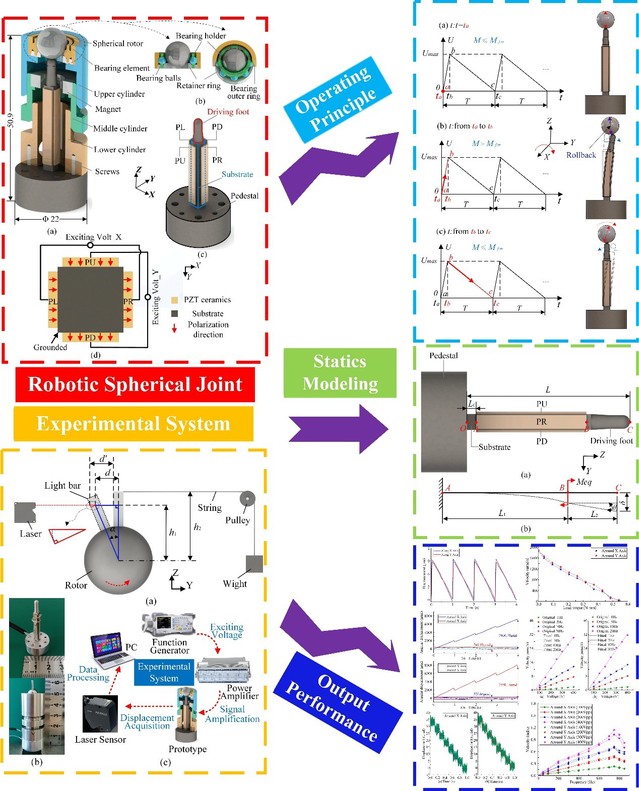
机器人球形关节的结构示意图、工作原理、静力学模型及其实验测试结果