近日,机器人技术与系统全国重点实验室刘英想教授团队在微小型机器人研究方面取得新进展,相关研究以《一种灵活的基于刚性圆环结构的3厘米尺度四足压电机器人》(An Agile 3cm-Scale Quadruped Piezoelectric Robot with a Rigid Ring-Shaped Structure)为题发表在《先进功能材料》(Advanced Functional Materials)上。这一研究成果为微小型机器人实现灵活快速运动、大负载能力、高分辨力兼备提供了一种有效的解决思路,在微小器件的大范围运输及检测等领域具有应用潜力。
微小型机器人因其体积小、重量轻、运动灵活等特点,在显微操作、环境探察、救援搜索等领域展现出较好的应用前景,是机器人领域的热门研究方向。采用传统电磁驱动方式的机器人容易实现快速灵活运动,但受限于传动机构,结构相对复杂,不利于进一步小型化。此外,电磁驱动方式存在电磁干扰,且缩放轴承和线圈等组件后的输出力提升受限。压电驱动具有精度高、响应快、功率密度大、电磁兼容性好等优点,非常契合微小型机器人的发展需求,其中采用弹性体振动模态致动的谐振型压电机器人一般具有较高的速度,但存在平面灵活运动和大负载能力难以兼顾的矛盾。因此,如何研制出平面灵活运动和大负载能力兼备的微小型压电机器人成为本领域的重大挑战之一。
针对上述问题,自然界中的一些硬壳动物(如螃蟹等)提供了一种有趣的解决方案:它们用于保护身体的坚硬外壳有利于承受较大负载,同时通过足端的多方向致动轨迹实现了灵活运动。借鉴这一思路,团队提出了一种基于刚性圆环结构的3厘米尺度四足压电机器人:一方面利用设计的高刚度圆环基体和圆柱驱动足实现了大负载能力,另一方面通过圆环基体不同振动模态间的复合叠加,在足端生成了多维致动轨迹,实现了平面的直线和旋转运动。基于有限元方法,团队总结了关键结构参数对谐振频率和足端位移的影响规律,完成了机器人的结构参数设计。为了验证相关设计和方法的可行性,团队研制了体积为30×30×14.3立方毫米、重6.9克的圆环型四足压电机器人样机,并对其开展了一系列特性测试实验。实验结果表明,机器人样机在直线运动中最大速度为每秒255毫米,在200克(约30倍自重)的负载下其运动速度仍能达到每秒92毫米,通过使用脉冲超声激励方案,其分辨力可达0.25微米(μm)。机器人样机在旋转运动中最大速度为每秒1265度,在200克负载下其转速仍可达到每秒424度,在脉冲激励模式下其分辨力为32.7微弧度(μrad),机器人的功耗约为0.42瓦(电压峰-峰值为100)。机器人样机在运动速度、灵活性、负载能力和分辨力方面都展现出良好的性能。
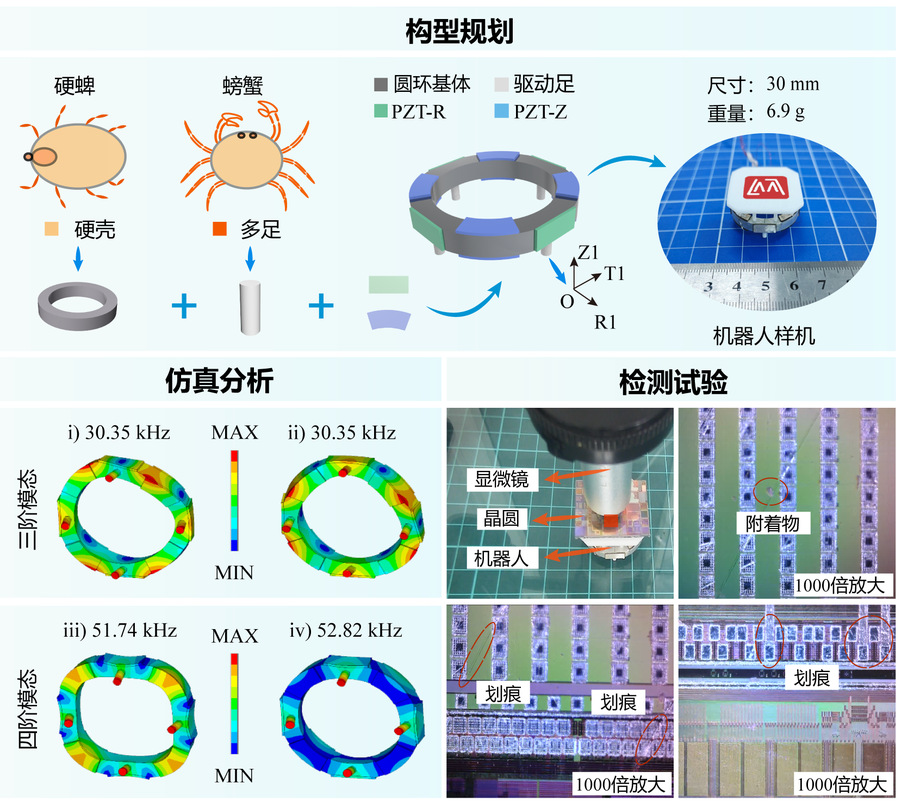
压电机器人的构型规划、仿真分析和展示试验
哈工大为论文唯一完成单位与通讯单位。机电工程学院李京副研究员和硕士研究生刘保熠为论文共同第一作者,刘英想教授为论文通讯作者,陈维山教授、张仕静副研究员和邓杰副教授为论文共同作者。
该项研究工作得到国家自然科学基金项目资助。
论文链接:https://onlinelibrary.wiley.com/doi/10.1002/adfm.202422499
新闻链接:https://news.hit.edu.cn/2025/0225/c1510a237507/page.htm