近日,机电工程学院谢晖教授团队研发出一种可精准控制打印结构磁化分布的光固化3D打印技术。相关研究成果以《磁矩空间可编程光固化打印技术制备仿生薄壁软体机器》(Programmable spatial magnetization stereolithographic printing of biomimetic soft machines with thin-walled structures)为题发表在《自然通讯》(Nature Communications)上,为精准制造磁性薄壁软体机器人提供了新途径。
软体机器人凭借其柔性、适应性和生物相容性,在生物医疗领域展现出广阔应用前景。通过外部磁场控制材料中磁性颗粒的排列方向,可实现对磁性软体机器人变形行为的精准调控。然而,复杂三维薄壁结构的制造仍是一大技术瓶颈。现有的磁场辅助直写打印和数字光处理技术易受重力和磁力干扰导致结构变形,难以突破平面或简单垂直壁结构的限制。这一挑战在制造具有大变形能力的三维薄壁结构时尤为突出。
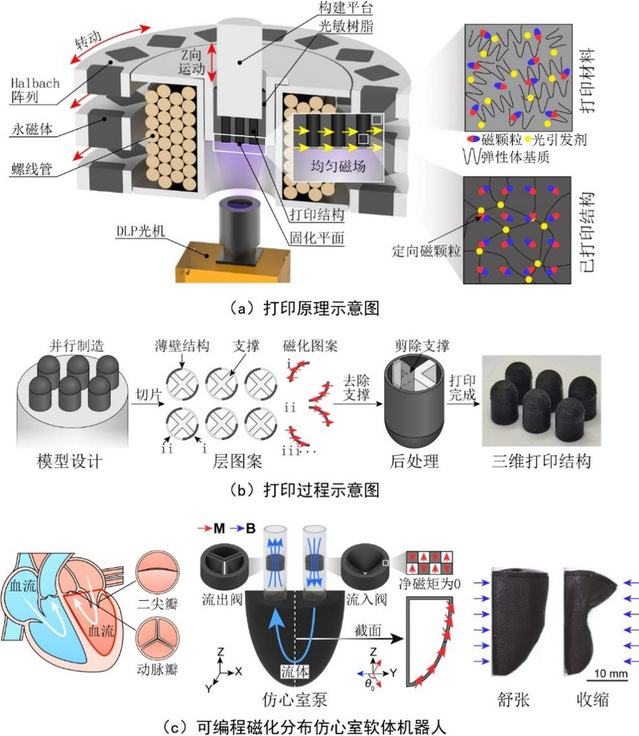
针对上述问题,团队创新性地将海尔贝克阵列与电磁线圈相结合,设计出一款低功耗磁场发生器,可在光固化平面内产生高强度、三维均匀可控的磁场。该系统在直径40毫米的工作空间内实现了80毫特斯拉的磁场强度,均匀度误差控制在5%以内,角度误差小于1.5°,打印面积较同类技术提升一个数量级。通过磁场发生器精准控制光固化结构中硬磁颗粒的磁矩方向,实现了复杂磁性薄壁结构的制造。团队还通过优化含硬磁颗粒的光固化树脂配方并改进支撑添加策略,显著提升了工艺稳定性。该技术可制造最小壁厚200微米、空心率达0.92的精细结构,并支持多单元并行制造。
基于该技术,研究团队成功开发出多种功能型软体机器人原型,包括具有仿生特性的磁控单向阀、蠕动功能输运机器人、仿心室软体机器人和胶囊软体机器人,展现了在模拟复杂生物行为和功能方面的应用潜力。该技术不仅突破了磁性软体机器人复杂中空薄壁结构的制造瓶颈,也为其在仿生和药物递送等领域的应用开辟了新途径。
仿心室软体机器人
胶囊软体机器人
机器人技术与系统全国重点实验室为论文唯一单位。谢晖教授为论文通讯作者。机电工程学院青年教师孟祥和、博士研究生李诗诗为论文共同第一作者。机电工程学院博士研究生沈行健、田陈堯、毛立阳为论文共同作者。生命科学和医学学部胡颖教授、王星文副研究员为相关研究工作提供大力支持。
该项研究工作得到了国家重点研发计划、国家自然科学基金等项目的资助。
论文链接:https://doi.org/10.1038/s41467-024-54773-2
新闻链接:https://news.hit.edu.cn/2024/1205/c1510a236969/page.htm